Jan 24, 2024
Researchers design new open-source technology for interfacing with living neurons
Posted by Cecile G. Tamura in categories: biological, neuroscience
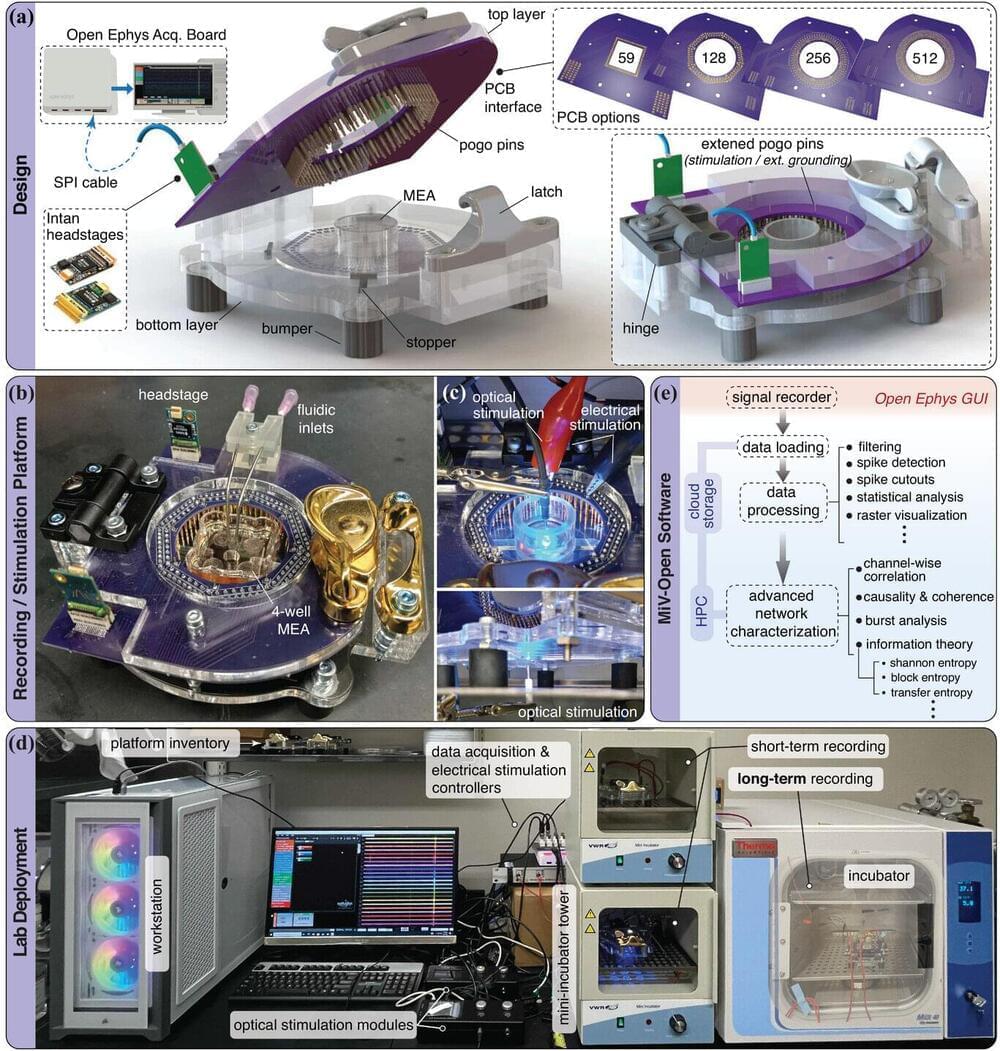
Mind In Vitro Platforms: Versatile, Scalable, Robust, and Open Solutions to Interfacing with Living Neurons.
Neurons intricately communicate and respond to stimuli within a vast network, orchestrating essential functions from basic bodily processes to complex thoughts. Traditional neuroscience methods, relying on in vivo electrophysiology (within a living organism), often have difficulty addressing the complexity of the brain as a whole.
An alternative approach involves extracting cells from the organism and conducting studies on a culture dish instead (in vitro), providing researchers with enhanced control and precision in measuring neural processes.