Nov 10, 2024
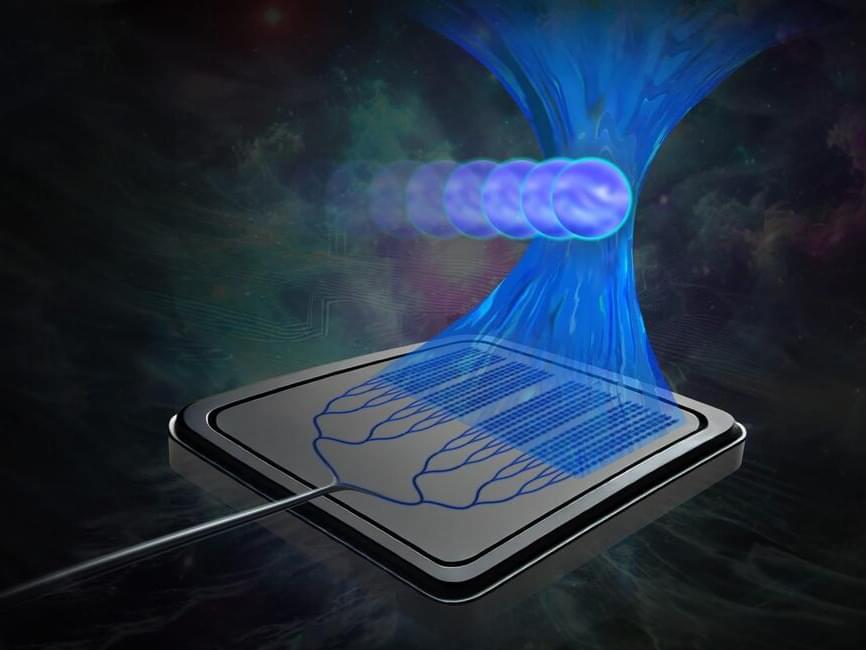
Flexible circuits made with silk and graphene
Posted by Tom Soetebier in categories: computing, materials
After thousands of years as a highly valuable commodity, silk continues to surprise. Now it may help usher in a whole new direction for microelectronics and computing.
While silk protein has been deployed in designer electronics, its use is currently limited in part because silk fibers are a messy tangle of spaghetti-like strands.
Now, a research team led by scientists at the Department of Energy’s Pacific Northwest National Laboratory has tamed the tangle. They report in the journal Science Advances (“Two-dimensional silk”) that they have achieved a uniform two-dimensional (2D) layer of silk protein fragments, or “fibroins,” on graphene, a carbon-based material useful for its excellent electrical conductivity.