Page 9532

Dec 7, 2018
90% of All the Scientists That Ever Lived Are Alive Today
Posted by Shailesh Prasad in category: futurism

This simple statistic captures the power of the exponential growth in science that has been taking place over the past century. It is attributable to Derek de Solla Price, the father of scientometrics (i.e., the science of studying science), in his 1961 book Science Since Babylon. If science is growing exponentially, then the major technological advancements and upheavals of the past 200 years are only the tip of the iceberg.
Read more
Dec 7, 2018
FDA Approves Drug That Targets Key Genetic Driver of Cancer
Posted by Nicholi Avery in categories: biotech/medical, genetics

Imagine one drug that can target and kill malignant cells for some patients with many types of cancer. A new drug called Vitrakvi (larotrectinib), now approved by the U.S. Food and Drug Administration, shows promise of doing just that for both adults and children with a variety of sometimes rare cancers that share one specific genetic mutation.
The mutation, called a TRK fusion, occurs when one of three NTRK genes becomes mistakenly connected to an unrelated gene and ignites uncontrolled growth. By solely targeting this mutation, the drug is designed to turn off growth signaling with a minimum of other toxicities.
According to the drug manufacturer, Loxo Oncology, this specific mutation can occur in a small subset of various adult and pediatric solid tumors ranging from cancers of the appendix, bile ducts, breast, lung, pancreas and thyroid to melanoma, GIST and various sarcomas.
Continue reading “FDA Approves Drug That Targets Key Genetic Driver of Cancer” »
Dec 7, 2018
We finally know what causes childhood leukemia — and how to prevent it
Posted by Nicholi Avery in category: futurism

Dec 7, 2018
Massive Cave Discovered in Canada, Named After ‘Star Wars’ Beast
Posted by Genevieve Klien in categories: climatology, sustainability

A massive, previously unexplored cave discovered by accident in Canada has been named “Sarlacc’s Pit,” after the multi-tentacled alien beast that first made an appearance in Star Wars: Return of the Jedi.
Officials from Canada’s Ministry of Environment and Climate Change first came across the huge cavern in Wells Gray Provincial Park in British Columbia while conducting a caribou count by helicopter in March.
Continue reading “Massive Cave Discovered in Canada, Named After ‘Star Wars’ Beast” »
Dec 7, 2018
Tiny ceramic particles make this building material fire-safe
Posted by Genevieve Klien in categories: computing, particle physics
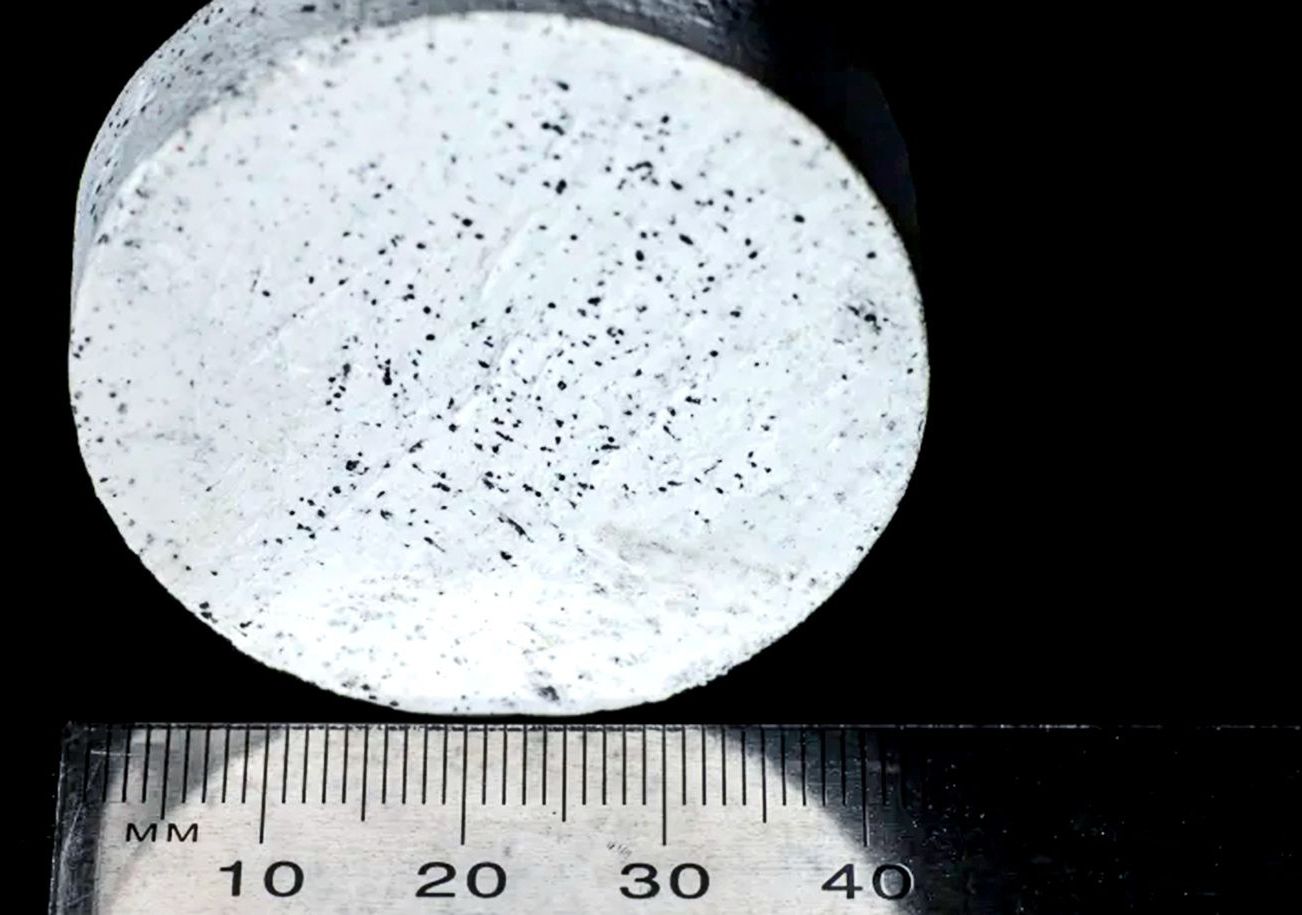
Inspired by the insulation on a humble electrical cable, researchers have found that tiny ceramic particles can make plastic-backed cladding fire-safe.
How do you make a light-weight cladding material that doesn’t catch fire? It’s a question the building industry globally is wrestling with in the wake of the 2017 Grenfell Tower blaze in London that cost the lives of 72 people.
But according to new research, the answer is under your desk in the plastic insulation around the electrical cable powering your computer.
Read more
Dec 7, 2018
We Need to Prepare For Quantum Attacks Now, Top US Scientists Warn
Posted by Genevieve Klien in categories: biotech/medical, cybercrime/malcode, engineering, information science, quantum physics

The promise of quantum computing brings with it some mind-blowing potential, but it also carries a new set of risks, scientists are warning.
Specifically, the enormous power of the tech could be used to crack the best cyber security we currently have in place.
A new report on the “progress and prospects” of quantum computing put together by the National Academies of Sciences, Engineering, and Medicine (NASEM) in the US says that work should start now on putting together algorithms to beat the bad guys.
Continue reading “We Need to Prepare For Quantum Attacks Now, Top US Scientists Warn” »
Dec 7, 2018
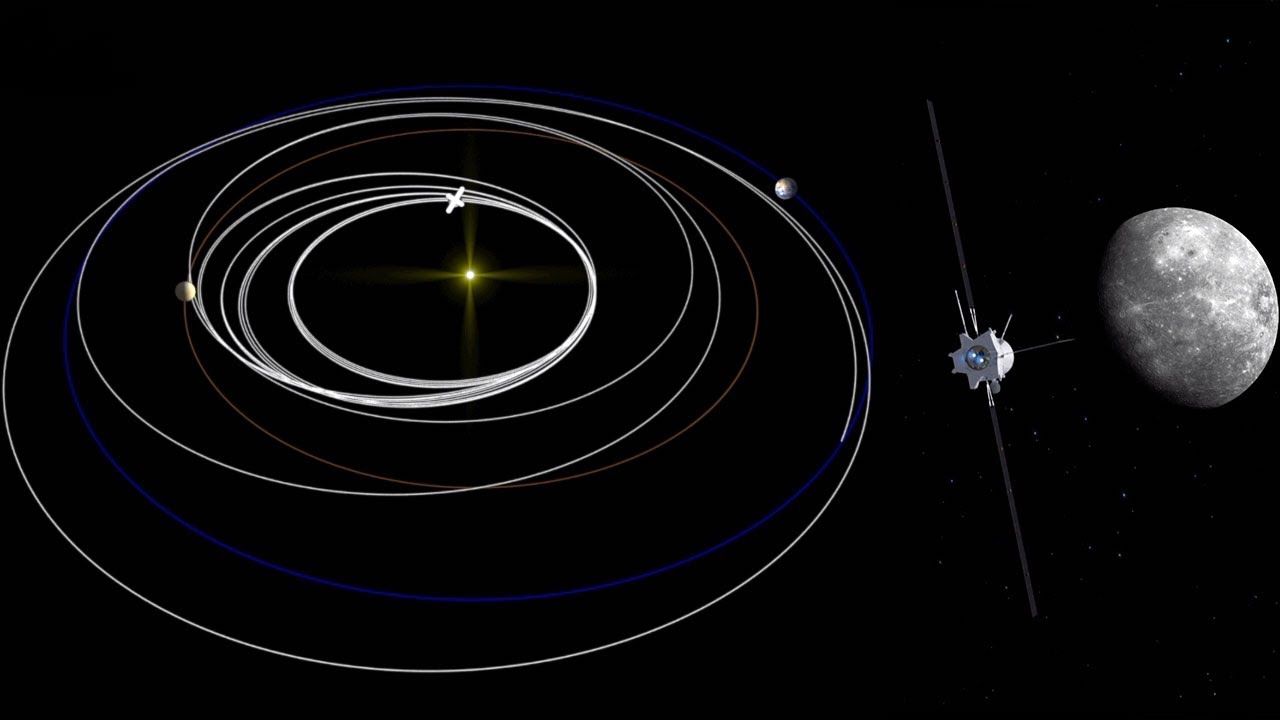
Probe Headed for Mercury Fires Most Powerful Ion Drive Ever Built
Posted by Genevieve Klien in category: space
Dec 7, 2018
World’s First Insect Vaccine Could Help Bees Fight Off Deadly Disease
Posted by Genevieve Klien in category: biotech/medical

Dec 7, 2018
Rare Brain-Eating Amoeba Kills Woman Who Filled Her Neti Pot With Tap Water
Posted by Genevieve Klien in categories: biotech/medical, neuroscience
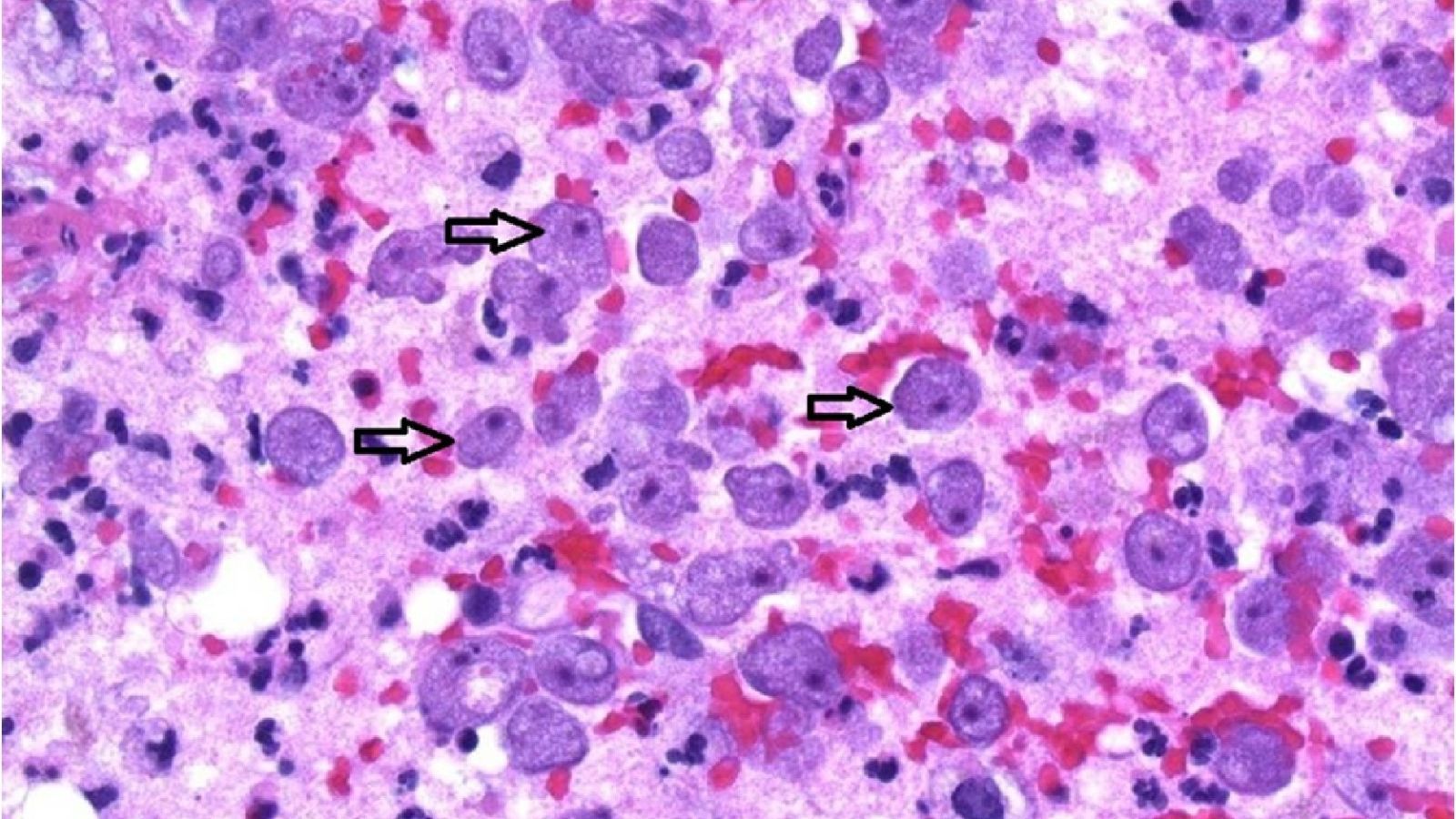
A 68-year-old Seattle woman who died after contracting a rare brain-eating amoeba used regular tap water to rinse her sinuses, according to new research.
As noted in a new International Journal of Infectious Diseases case study, the infection was initially misdiagnosed as a brain tumor. During surgery to remove the suspected tumor, the lead neurosurgeon, Charles Cobbs from Seattle’s Swedish Medical Center, was taken aback by the extent of the brain damage. So he extracted a sample for further testing.
Read more








