Four-legged animals are innately capable of agile and adaptable movements, which allow them to move on a wide range of terrains. Over the past decades, roboticists worldwide have been trying to effectively reproduce these movements in quadrupedal (i.e., four-legged) robots.
Computational models trained via reinforcement learning have been found to achieve particularly promising results for enabling agile locomotion in quadruped robots. However, these models are typically trained in simulated environments and their performance sometimes declines when they are applied to real robots in real-world environments.
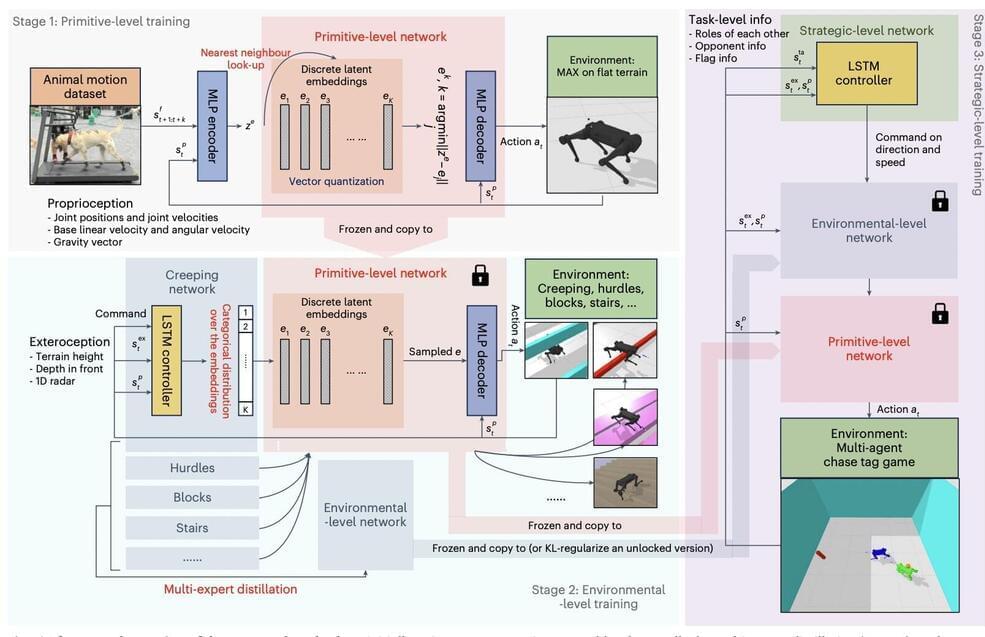
Alternative approaches to realizing agile quadruped locomotion utilize footage of moving animals collected by motion sensors and cameras as demonstrations, which are used to train controllers (i.e., algorithms for executing the movements of robots). This approach, dubbed “imitation learning,” was found to enable the reproduction of animal-like movements in some quadrupedal robots.









Leave a reply