A team of roboticists at the German Aerospace Center’s Institute of Robotics and Mechatronics finds that combining traditional internal force-torque sensors with machine-learning algorithms can give robots a new way to sense touch.
In their study published in the journal Science Robotics, the group took an entirely new approach to give robots a sense of touch that does not involve artificial skin.
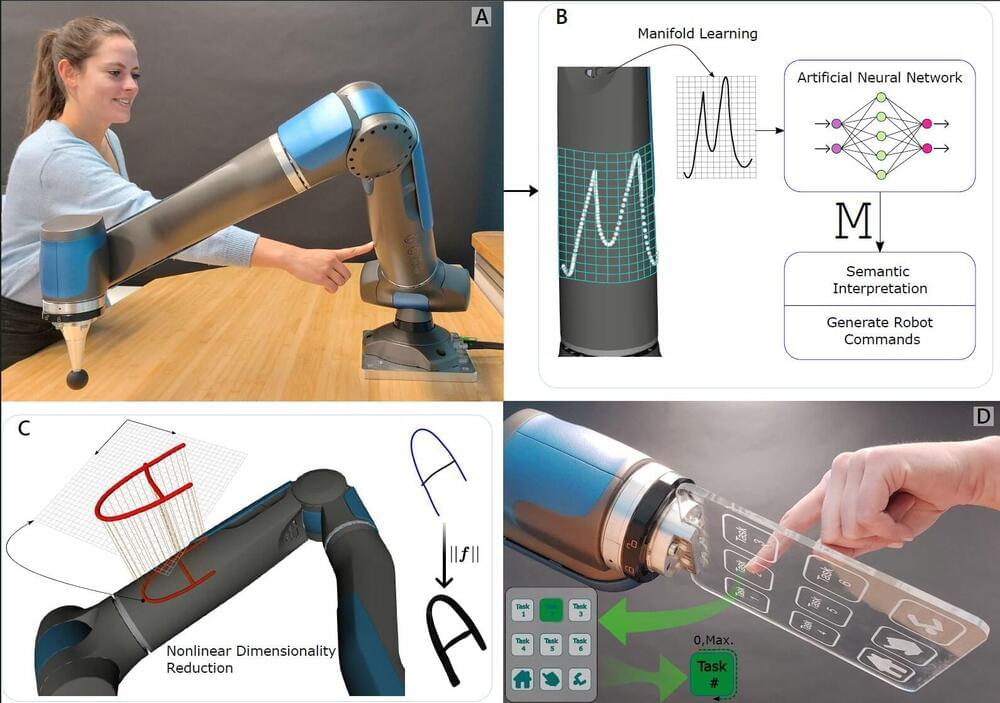
For living creatures, touch is a two-way street; when you touch something, you feel its texture, temperature and other features. But you can also be touched, as when someone or something else comes in contact with a part of your body. In this new study, the research team found a way to emulate the latter type of touch in a robot by combining internal force-torque sensors with a machine-learning algorithm.








Leave a reply